;(function() {
window.createMeasureObserver = (measureName) => {
var markPrefix = `_uol-measure-${measureName}-${new Date().getTime()}`;
performance.mark(`${markPrefix}-start`);
return {
end: function() {
performance.mark(`${markPrefix}-end`);
performance.measure(`uol-measure-${measureName}`, `${markPrefix}-start`, `${markPrefix}-end`);
performance.clearMarks(`${markPrefix}-start`);
performance.clearMarks(`${markPrefix}-end`);
}
}
};
/**
* Gerenciador de eventos
*/
window.gevent = {
stack: [],
RUN_ONCE: true,
on: function(name, callback, once) {
this.stack.push([name, callback, !!once]);
},
emit: function(name, args) {
for (var i = this.stack.length, item; i--;) {
item = this.stack[i];
if (item[0] === name) {
item[1](args);
if (item[2]) {
this.stack.splice(i, 1);
}
}
}
}
};
var runningSearch = false;
var hadAnEvent = true;
var elementsToWatch = window.elementsToWatch = new Map();
var innerHeight = window.innerHeight;
// timestamp da última rodada do requestAnimationFrame
// É usado para limitar a procura por elementos visíveis.
var lastAnimationTS = 0;
// verifica se elemento está no viewport do usuário
var isElementInViewport = function(el) {
var rect = el.getBoundingClientRect();
var clientHeight = window.innerHeight || document.documentElement.clientHeight;
// renderizando antes, evitando troca de conteúdo visível no chartbeat-related-content
if(el.className.includes('related-content-front')) return true;
// garante que usa ao mínimo 280px de margem para fazer o lazyload
var margin = clientHeight + Math.max(280, clientHeight * 0.2);
// se a base do componente está acima da altura da tela do usuário, está oculto
if(rect.bottom < 0 && rect.bottom > margin * -1) {
return false;
}
// se o topo do elemento está abaixo da altura da tela do usuário, está oculto
if(rect.top > margin) {
return false;
}
// se a posição do topo é negativa, verifica se a altura dele ainda
// compensa o que já foi scrollado
if(rect.top < 0 && rect.height + rect.top < 0) {
return false;
}
return true;
};
var asynxNextFreeTime = () => {
return new Promise((resolve) => {
if(window.requestIdleCallback) {
window.requestIdleCallback(resolve, {
timeout: 5000,
});
} else {
window.requestAnimationFrame(resolve);
}
});
};
var asyncValidateIfElIsInViewPort = function(promise, el) {
return promise.then(() => {
if(el) {
if(isElementInViewport(el) == true) {
const cb = elementsToWatch.get(el);
// remove da lista para não ser disparado novamente
elementsToWatch.delete(el);
cb();
}
}
}).then(asynxNextFreeTime);
};
// inicia o fluxo de procura de elementos procurados
var look = function() {
if(window.requestIdleCallback) {
window.requestIdleCallback(findByVisibleElements, {
timeout: 5000,
});
} else {
window.requestAnimationFrame(findByVisibleElements);
}
};
var findByVisibleElements = function(ts) {
var elapsedSinceLast = ts - lastAnimationTS;
// se não teve nenhum evento que possa alterar a página
if(hadAnEvent == false) {
return look();
}
if(elementsToWatch.size == 0) {
return look();
}
if(runningSearch == true) {
return look();
}
// procura por elementos visíveis apenas 5x/seg
if(elapsedSinceLast < 1000/5) {
return look();
}
// atualiza o último ts
lastAnimationTS = ts;
// reseta status de scroll para não entrar novamente aqui
hadAnEvent = false;
// indica que está rodando a procura por elementos no viewport
runningSearch = true;
const done = Array.from(elementsToWatch.keys()).reduce(asyncValidateIfElIsInViewPort, Promise.resolve());
// obtém todos os elementos que podem ter view contabilizados
//elementsToWatch.forEach(function(cb, el) {
// if(isElementInViewport(el) == true) {
// // remove da lista para não ser disparado novamente
// elementsToWatch.delete(el);
// cb(el);
// }
//});
done.then(function() { runningSearch = false; });
// reinicia o fluxo de procura
look();
};
/**
* Quando o elemento `el` entrar no viewport (-20%), cb será disparado.
*/
window.lazyload = function(el, cb) {
if(el.nodeType != Node.ELEMENT_NODE) {
throw new Error("element parameter should be a Element Node");
}
if(typeof cb !== 'function') {
throw new Error("callback parameter should be a Function");
}
elementsToWatch.set(el, cb);
}
var setEvent = function() {
hadAnEvent = true;
};
window.addEventListener('scroll', setEvent, { capture: true, ive: true });
window.addEventListener('click', setEvent, { ive: true });
window.addEventListener('resize', setEvent, { ive: true });
window.addEventListener('load', setEvent, { once: true, ive: true });
window.addEventListener('DOMContentLoaded', setEvent, { once: true, ive: true });
window.gevent.on('allJSLoadedAndCreated', setEvent, window.gevent.RUN_ONCE);
// inicia a validação
look();
})();
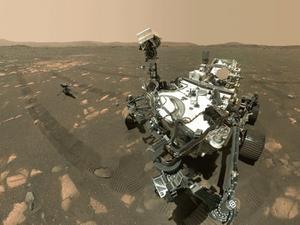
Missão em Marte: As incríveis imagens dos primeiros 100 dias de robô da Nasa no planeta vermelho
Imagem: NASA/JPL-Caltech/ASU
01/06/2021 15h19
O Perseverance da Nasa está comemorando 100 dias marcianos (ou sóis) desde o desembarque em Marte, onde está procurando por sinais de vida microbiana ada e investigando a geologia e o clima do planeta.
O rover Perseverance da Nasa está comemorando 100 dias marcianos (ou sóis) desde o pouso em Marte, onde está procurando por sinais de vida microbiana ada e investigando a geologia do planeta e o clima anterior.
Desde o pouso em 18 de fevereiro, o robô capturou algumas imagens incríveis em torno de seu local de pouso, a cratera de Jezero, uma depressão de impacto de 49 km ao norte do equador do Planeta Vermelho.
Um pequeno helicóptero, o Ingenuity, também transmitiu imagens aéreas, tendo feito história com os primeiros voos motorizados e controlados em outro planeta.
Aqui está uma seleção de fotos enviadas da missão até agora.
Em 6 de abril, a Perseverance usou a câmera Watson (Sensor Topográfico de Grande Angular para Operações e eNgineering) para tirar esta selfie ao lado do helicóptero Ingenuity. Esta foto é composta por 62 imagens individuais que foram costuradas depois de enviadas para a Terra
Imagem: NASA/JPL-Caltech/MSSS
Em 7 de maio, o Ingenuity atingiu uma altura de 10m, antes de voar 129m para um novo local de pouso
Imagem: Nasa
A Ingenuity fotografou o Perseverance durante seu terceiro vôo. Na época, o mini-helicóptero estava a cerca de 85 m do rover e voando lateralmente a uma altitude de 5 m. Um dos pés do Ingenuity também é visível na borda da imagem, logo abaixo do veículo espacial.
Imagem: NASA
Dias antes, o Ingenuity havia sido lançado da parte de baixo do veículo espacial
Imagem: Nasa
Esta imagem mostra Santa Cruz, uma colina a cerca de 1,5 milhas (2,5 km) de distância do rover. A cena inteira está dentro da cratera Jezero de Marte; a borda da cratera pode ser vista na linha do horizonte além da colina.
Imagem: Nasa
O Perseverance é equipado com um laser projetado para ajudá-lo a coletar dados sobre a geologia do planeta. Enquanto investigava esta rocha de 15 cm, o instrumento deixou uma linha tênue de pontos que é visível perto de seu centro.
Imagem: Só BBC
A Ingenuity captou sua primeira imagem aérea colorida durante seu segundo vôo. O drone pairou cerca de 5m acima do solo, inclinou-se e moveu-se lateralmente 2m, antes de retornar ao local de onde decolou. Os rastros de Perseverance e a sombra de Ingenuity são visíveis na superfície marciana
Imagem: Nasa
O rover Perseverance tem financiamento inicial para operar por um ano de Marte, cerca de dois anos terrestres.
























ID: {{comments.info.id}}
URL: {{comments.info.url}}
Ocorreu um erro ao carregar os comentários.
Por favor, tente novamente mais tarde.
{{comments.total}} Comentário
{{comments.total}} Comentários
Seja o primeiro a comentar
Essa discussão está encerrada
Não é possivel enviar novos comentários.
Essa área é exclusiva para você, , ler e comentar.
Só s do UOL podem comentar
Ainda não é ? Assine já.
Se você já é do UOL, faça seu .
O autor da mensagem, e não o UOL, é o responsável pelo comentário. Reserve um tempo para ler as Regras de Uso para comentários.