39 segundos: por que primeiro voo do Ingenuity em Marte foi tão curto

O Ingenuity, da agência espacial Nasa, entrou para a história nesta segunda (19) como o primeiro helicóptero a voar em outro planeta. Por enquanto, tivemos apenas um gostinho de sua atuação em Marte: ele subiu e desceu em apenas 39,1 segundos.
O Ingenuity decolou às 4h34 (Brasília), horário que a equipe acreditou oferecer as melhores condições de voo e energia. Ele alcançou três metros de altitude, se mantendo estável lá em cima por cerca de 30 segundos, e voltou ao solo.


O rover Perseverance ficou estacionado a uma distância segura de 64 metros, para registrar o momento e servir de ponte de comunicação com a Terra.
Assim foi o primeiro voo motorizado controlado em outro planeta: inovador mas pouco ousado. Por se tratar de um teste inicial, o Ingenuity ainda não foi levado aos limites de sua tecnologia.
O procedimento foi feito autonomamente, sem controle humano —demora 16 minutos para que um sinal de rádio viaje entre Marte e a Terra, e outros 16 para retornar, impossibilitando comandos em tempo real, como um joystick.
As instruções foram enviadas pelos engenheiros com antecedência, e as eventuais decisões do momento tomadas pelo próprio helicóptero robozinho, equipado com um computador de bordo baseado com processador Qualcomm Snapdragon rodando Linux.
Agora, o Ingenuity está dormindo para recarregar as baterias, por meio de seus painéis solares. Essa é sua maior limitação. A cada carga, ele consegue voar até 90 segundos, chegando a no máximo cinco metros de altura e 300 metros de distância.
Devem ser realizados mais quatro testes nas próximas duas semanas, cada vez mais complexos e desafiadores. Até o quinto voo, a meta é subir a 5 metros, se deslocar horizontalmente por 50 metros, e pousar.
Por enquanto, as equipes do Laboratório de Propulsão a Jato (JPL), da Nasa, estão analisando todas as imagens e dados de telemetria recebidos, que demoram horas para chegar totalmente à Terra, para planejar o segundo experimento. O próximo voo pode acontecer na quinta-feira (22).
Engenhosidade
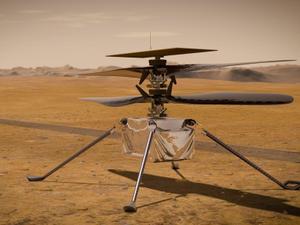
O Ingenuity (Engenhosidade, em tradução livre) é um moderno mini-helicóptero - ou grande drone —de 1,8 kg e 49 cm de altura, com duas grandes hélices de 1,2 m. Elas tiveram de trabalhar a uma absurda taxa de 2.500 rotações por minuto. Isso é cinco vezes mais rápido que um helicóptero terrestre comum, que faz 400 a 500 giros por minuto.
As pás giratórias são feitas de uma moderna espuma de fibra de carbono. Essa velocidade e leveza foram necessárias para conseguir decolar em uma atmosfera que tem 1% da densidade do ar terrestre no nível do mar. Foi como voar a mais de 30 mil metros de altitude em nosso planeta.
Um termostato o manteve na temperatura correta de funcionamento e os sensores e imagens do solo mostravam se ele estava seguindo a direção definida pela equipe. As câmeras também registraram sua própria sombra em solo.
O Ingenuity é uma prova de conceito. Seu objetivo não é realizar nenhum experimento, mas sim demonstrar a própria tecnologia: sim, é possível voar no ar super-rarefeito, em um ambiente hostil, com baixa gravidade e temperaturas que chegam a -90°C.
Pista de pouso
A Nasa batizou o local onde o Ingenuity decolou em Marte de Wright Brothers Field, em homenagem aos irmãos pioneiros, que "disputam" com o brasileiro Santos Dumont o posto de inventores do avião. O helicóptero leva em sua fuselagem um pedaço da lona que revista uma das asas do "Wright Flyer", o avião que eles fizeram voar em 1903.
Na linguagem da aviação, o "aeroporto" marciano recebeu o código JZRO (referente à Cratera Jezero, onde a missão acontece) e o Ingenuity é a aeronave IGY-1.
O helicóptero faz parte da missão Mars 2020, da Nasa, cujo principal instrumento é o rover Perseverance. Ele chegou ao planeta guardado na "barriga" do robô-jipinho, em fevereiro. Este mês, foi finalmente "desdobrado" e liberado ao solo, e se preparou para voar.
O Ingenuity poderá transformar a exploração espacial. Se bem-sucedido, abrirá portas para uma extensiva exploração aérea de Marte e de outros planetas em futuras missões.













ID: {{comments.info.id}}
URL: {{comments.info.url}}
Ocorreu um erro ao carregar os comentários.
Por favor, tente novamente mais tarde.
{{comments.total}} Comentário
{{comments.total}} Comentários
Seja o primeiro a comentar
Essa discussão está encerrada
Não é possivel enviar novos comentários.
Essa área é exclusiva para você, , ler e comentar.
Só s do UOL podem comentar
Ainda não é ? Assine já.
Se você já é do UOL, faça seu .
O autor da mensagem, e não o UOL, é o responsável pelo comentário. Reserve um tempo para ler as Regras de Uso para comentários.