Busca por vida: robô Perseverance completa 1 ano marciano; o que fará agora

Hoje (6), o rover Perseverance, da Nasa, completou sua missão principal em Marte, após quase dois anos no planeta vermelho. Ainda plenamente operante, inicia sua estadia prolongada, com novos objetivos.
Seu objetivo principal é procurar por sinais de vida em solo marciano, inclusive com a coleta de amostras para serem recolhidas por outra nave e trazidas à Terra em 2030. É neste processo que ele irá focar agora.


O Perseverance chegou a Marte no dia 18 de fevereiro de 2021, em um pouso incrível, após quase sete meses de viagem. Sua missão era prevista para durar um ano marciano — equivalente a 687 dias terrestres, ou 1 ano e 322 dias.
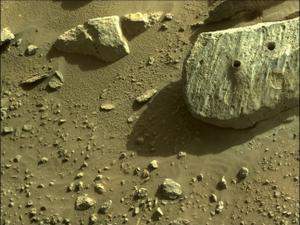
Para retirar as amostras, ele usa uma broca especial na ponta de seu braço robótico, capaz de extrair núcleos rochosos inteiros do fundo da cratera Jezero, um antigo lago — se houve vida em Marte, mesmo que microbiana, este é o o lugar mais provável. As rochas são armazenadas em tubos selados, cuidadosamente depositados na superfície do planeta, que devem serem recolhidos por uma futura missão, parceria da Nasa e a ESA (Agência Espacial Européia), para que sejam analisados minuciosamente em laboratórios.

Até agora, o o robô-jipinho já encheu e selou 18 de seus 38 tubos de amostras, com 83% de rochas, 6% de elementos atmosféricos e 11% de material superficial do planeta vermelho.
Em sua jornada, ele também está testando tecnologias que podem pavimentar o caminho para a futura exploração humana de Marte. Isso inclui o pequeno helicóptero espacial Ingenuity e um estudo da capacidade de produzirmos oxigênio a partir da tóxica atmosfera marciana, carregada de dióxido de carbono.
Vida em Marte?
Os cientistas procuram, principalmente, por rochas que se formaram ou foram alteradas pela água — fundamental para a existência de vida como a conhecemos.
"Bilhões de anos atrás, um rio caudaloso carregou detritos e pedras por quilômetros além das muralhas de Jezero. Vamos explorar esses antigos depósitos fluviais e obter amostras de suas pedras e rochas de longa viagem", explica Katie Stack Morgan, cientista do projeto Perseverance no Laboratório de Propulsão a Jato (JPL), da Nasa.
Também foram coletadas rochas vulcânicas e amostras com possíveis moléculas orgânicas, para traçar um registro das mudanças geológicas e ambientais ao longo do tempo.

Após identificar uma rocha de interesse, o Perseverance extrai uma amostra do núcleo dela com sua broca rotativa. Então tampa e sela hermeticamente cada tubo — que pesa cerca de 15 gramas — e os coloca em um contêiner de armazenamento a bordo, até encontrar um local adequado para depositá-los.
Futuro do Perseverance
Ao preencher todos os tubos, o Perseverance seguirá para a nascente do antigo do rio Jezero — este trajeto deve ser cumprido em fevereiro. Ao longo dos oito meses seguintes, o robô vai explorar aquela região, procurando por fragmentos de vida, além de possíveis rochas que foram arrastadas para a cratera.
A reta final de seu processo de exploração é colocar as amostras em uma mesma localização na superfície marciana, aguardando a coleta pela futura missão — esperada para acontecer entre 2020 e 2030.
Segundo a Nasa, o planejamento da Campanha de Devolução de Amostras de Marte já está em andamento. Ela envolve vários veículos, para coletar as amostras em solo, lançar um foguete para levá-las até a órbita do planeta e embarcar em uma nave com destino à Terra.
Para encontrar objetos tão pequenos, a equipe terá a ajuda das imagens obtidas por sondas orbitadoras — com precisão de localização de cerca de 1 metro — e as fotos tiradas pelas câmeras do próprio rover — que aumentam essa precisão para menos de 1 centímetro.
Ao chegar aqui, as amostras serão analisadas em laboratórios com equipamentos sofisticados. Com esses dados, os cientistas das próximas gerações podem determinar se já existiu qualquer tipo de vida em Marte, e até mesmo se ainda existe.
* Com informações de Space e da Nasa













ID: {{comments.info.id}}
URL: {{comments.info.url}}
Ocorreu um erro ao carregar os comentários.
Por favor, tente novamente mais tarde.
{{comments.total}} Comentário
{{comments.total}} Comentários
Seja o primeiro a comentar
Essa discussão está encerrada
Não é possivel enviar novos comentários.
Essa área é exclusiva para você, , ler e comentar.
Só s do UOL podem comentar
Ainda não é ? Assine já.
Se você já é do UOL, faça seu .
O autor da mensagem, e não o UOL, é o responsável pelo comentário. Reserve um tempo para ler as Regras de Uso para comentários.