ASMR do Perseverance: relaxe com sons do vento em Marte e de raios laser

Os primeiros áudios de alta qualidade que o rover Perseverance gravou em Marte foram divulgados pela Nasa nesta semana. São sons estranhamente relaxantes, de raios laser pulverizando rochas e do vento na superfície do planeta.
O objetivo não é apenas nos presentear com ASMR alienígena (técnica que usa sons para relaxar e produzir sensações agradáveis). O laser, que soa como uma série de cliques, ajuda os cientistas a analisar a composição do planeta vermelho.


Nesta gravação, o experimento foi realizado na rocha chamada "Máaz" ("Marte" na língua navaja), que os cientistas concluíram ser basáltica, com muito magnésio e ferro.
Tanto a gravação dos áudios quanto o disparo dos raios foram obra do moderno instrumento SuperCam que, além de capturar imagens em altíssima definição como o nome sugere, é equipado com um microfone super sensível, laser e sensores. É o bloco, do tamanho de uma caixa de sapatos, que parece a "cabeça" do robô.
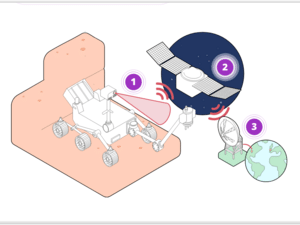
A uma distância de até sete metros do alvo, o Perseverance dispara o laser e, na sequência, utiliza a câmera e o espectrômetro para analisar o gás que a rocha produz ao ser vaporizada. O som emitido oferece informações adicionais a respeito das propriedades do material, como a rigidez ou porosidade.
Já a gravação do vento faz parte das pesquisas a respeito da atmosfera e do clima marciano.
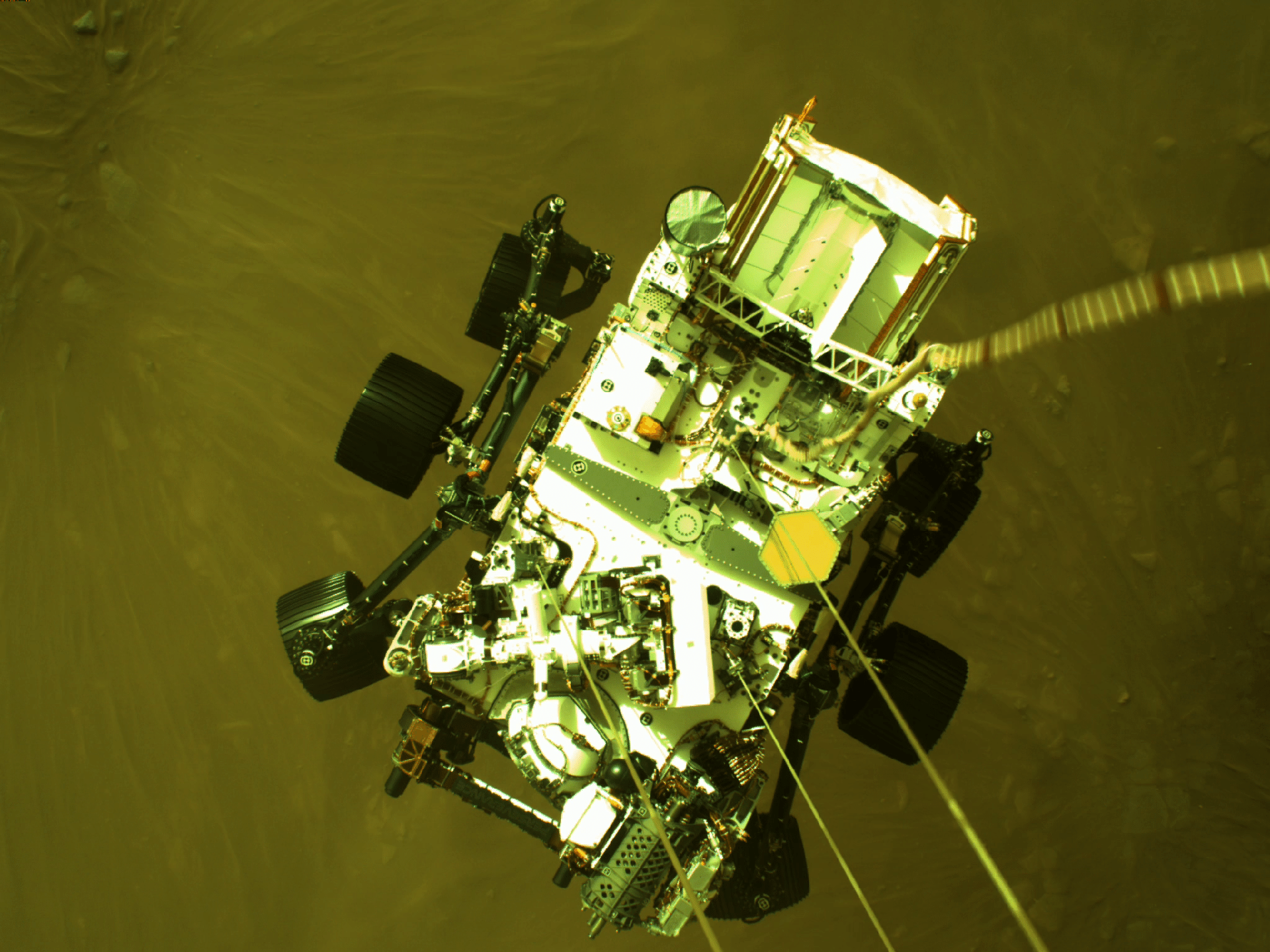
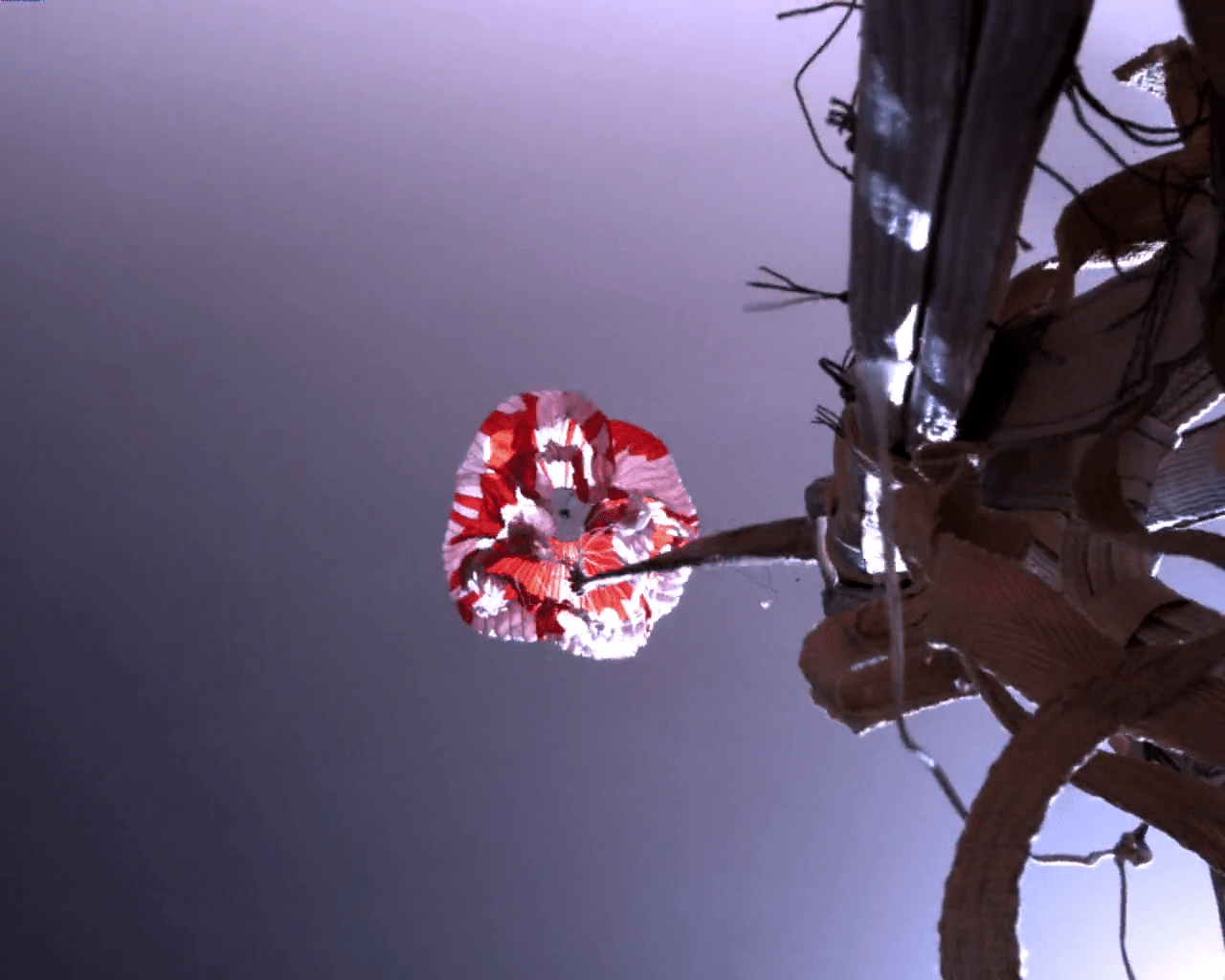
Desde seu pouso histórico no mês ado, o Perseverance tem enviado diversas fotos, vídeos e áudios, diretamente de Marte. As imagens, apesar de em qualidade nunca antes vista, não são exatamente novidade. Mas é a primeira vez que um rover usa um microfone no planeta vermelho.





A SuperCam foi desenvolvida com o trabalho de um brasileiro, o engenheiro Ivair Gontijo, de Minas Gerais.
O principal objetivo do instrumento é localizar tipos de solo e rochas com texturas e compostos químicos que remontem à existência de água no planeta há muito tempo — já sabemos que água é a chave para a vida.













ID: {{comments.info.id}}
URL: {{comments.info.url}}
Ocorreu um erro ao carregar os comentários.
Por favor, tente novamente mais tarde.
{{comments.total}} Comentário
{{comments.total}} Comentários
Seja o primeiro a comentar
Essa discussão está encerrada
Não é possivel enviar novos comentários.
Essa área é exclusiva para você, , ler e comentar.
Só s do UOL podem comentar
Ainda não é ? Assine já.
Se você já é do UOL, faça seu .
O autor da mensagem, e não o UOL, é o responsável pelo comentário. Reserve um tempo para ler as Regras de Uso para comentários.