Quem é a escritora que deu nome ao local de pouso do robô da Nasa em Marte

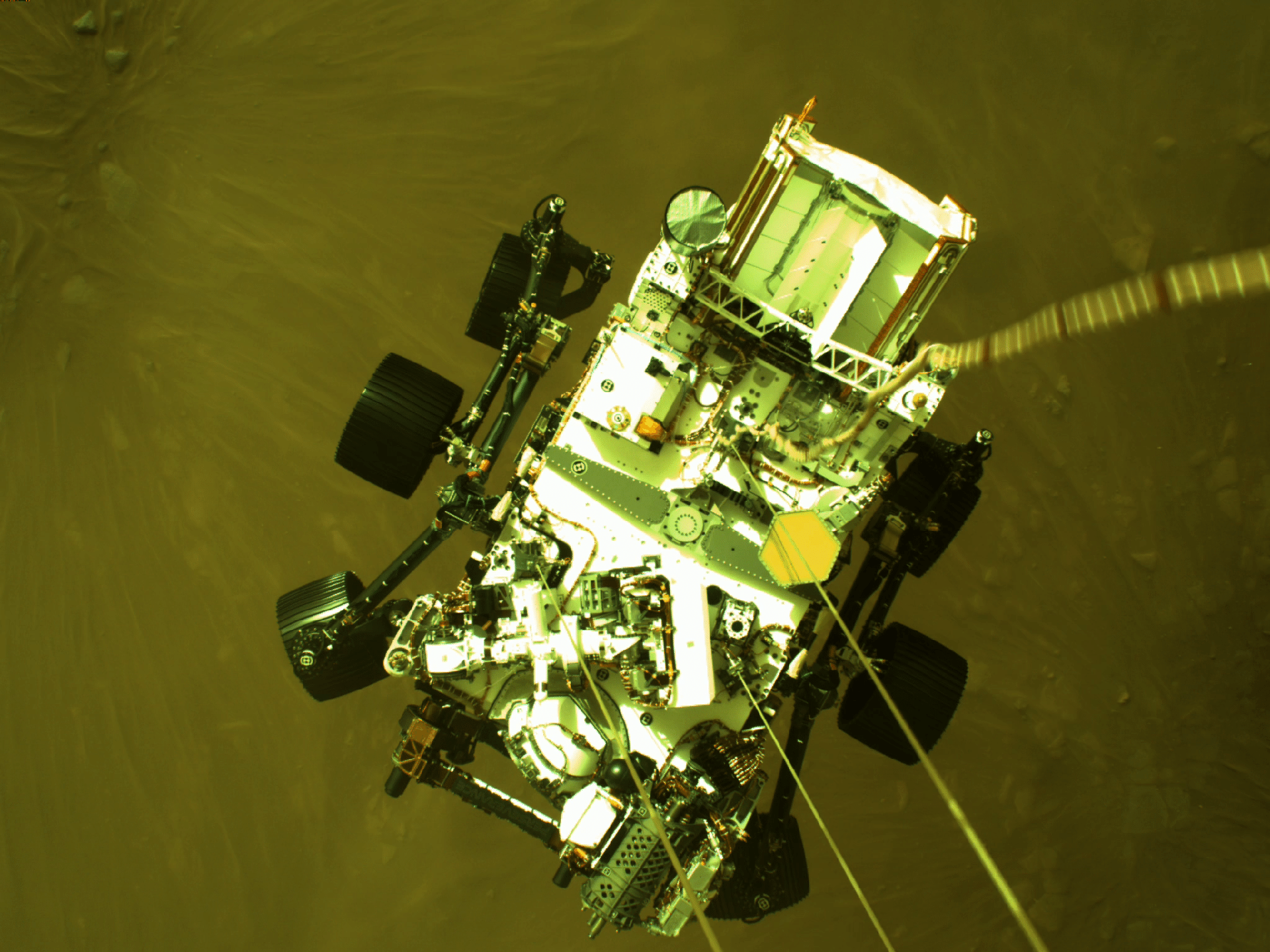
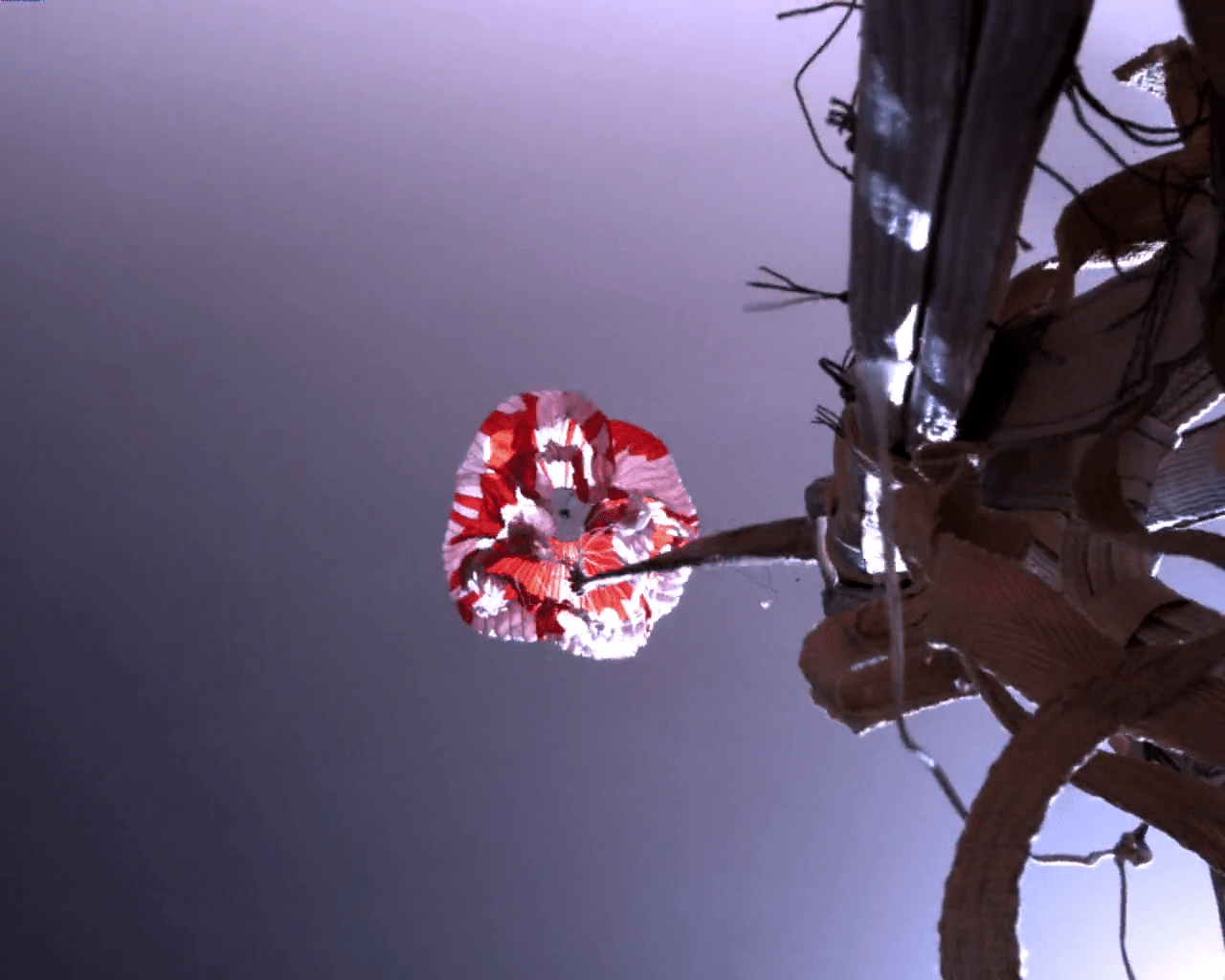
O rover Perseverance, da Nasa, pousou em Marte no dia 18 de fevereiro, na área conhecida como cratera Jezero. O local em que ele tocou o solo marciano acaba de ser batizado em homenagem a uma mulher inspiradora: a escritora Octavia Estelle Butler.
A afro-americana, nascida na Califórnia (EUA), ficou conhecida por seus livros de ficção científica com temática feminista e racial. As séries "Patternist" (1976-1984), "Xenogenesis" (1987-1989) e "Parable" (1995-1998) são suas obras de maior sucesso.



As histórias distópicas de Butler falam de vampiros, aliens e viajantes do tempo, como forma de criticar preconceitos de nossa sociedade, como as hierarquias, o racismo e a misoginia. Unindo elementos da cultura africana, espiritualidade, misticismo, mitologia e ecologia, a autora foi uma das precursoras do movimento afrofuturismo.
"Seu trabalho pioneiro explora temas de raça e igualdade de gênero na humanidade, focando nas experiências de mulheres negras, em uma época em que suas vozes eram muito ausentes da ficção científica", disse Katie Stack Morgan, cientista do projeto Perseverance, em uma transmissão da Nasa.
A escritora americana conquistou espaço e deixou a sua marca no gênero Sci-Fi, então totalmente dominado por homens brancos. Ela foi a primeira mulher negra a ganhar os prêmios Hugo e Nebula, de ficção científica e fantasia.
Octavia Butler faleceu em 2006, aos 58 anos. Na época, a própria exploração de Marte era mais ficção do que realidade. Quinze anos depois, seu trabalho continua inspirando inovação, ciência e um futuro mais justo.
"Os protagonistas de Butler incorporam determinação e criatividade, fazendo dela uma escolha perfeita para a missão do rover Perseverance e sua temática de superação de desafios. Ela inspirou e influenciou a comunidade científica planetária", completou Morgan.





Cratera Jezero
Com 40km de diâmetro e 500m de profundidade, o local foi um lago há mais de três bilhões de anos — "Jezero" significa "lago" em idiomas eslavos. Se já existiu vida no planeta vermelho, mesmo que apenas atividade microbiana, lá estão as maiores chances de guardar evidências.
O Perseverance deve realizar seus experimentos lá por, pelo menos, 687 dias terrestres (um ano marciano). Ele já está enviando à Terra imagens impressionantes, em qualidade nunca antes vista.

Na semana ada, o robô-jipinho completou com sucesso seu primeiro teste de reconhecimento. Durante 33 minutos, ele andou por 4 metros, girou 150 graus para a esquerda em seu próprio eixo e avançou mais 2,5 metros para uma nova posição. Essa pequena jornada de 6,5m foi uma grande vitória para o controle da missão aqui na Terra.
A equipe acredita que todos os sistemas - tanto a parte física, como tração das rodas, quando os softwares — estão prontos para o início real oficial da exploração. O grande braço robótico de 2 metros de comprimento também foi testado, tendo suas cinco articulações movimentadas durante duas horas.
Quando o rover entrar em ação, seus instrumentos e sistemas continuarão sendo calibrados. Ele irá percorrer grandes distâncias, de até 200 metros, entre um ponto de estudos e outro.














ID: {{comments.info.id}}
URL: {{comments.info.url}}
Ocorreu um erro ao carregar os comentários.
Por favor, tente novamente mais tarde.
{{comments.total}} Comentário
{{comments.total}} Comentários
Seja o primeiro a comentar
Essa discussão está encerrada
Não é possivel enviar novos comentários.
Essa área é exclusiva para você, , ler e comentar.
Só s do UOL podem comentar
Ainda não é ? Assine já.
Se você já é do UOL, faça seu .
O autor da mensagem, e não o UOL, é o responsável pelo comentário. Reserve um tempo para ler as Regras de Uso para comentários.