Não, o rover Perseverance não localizou um arco-íris em Marte

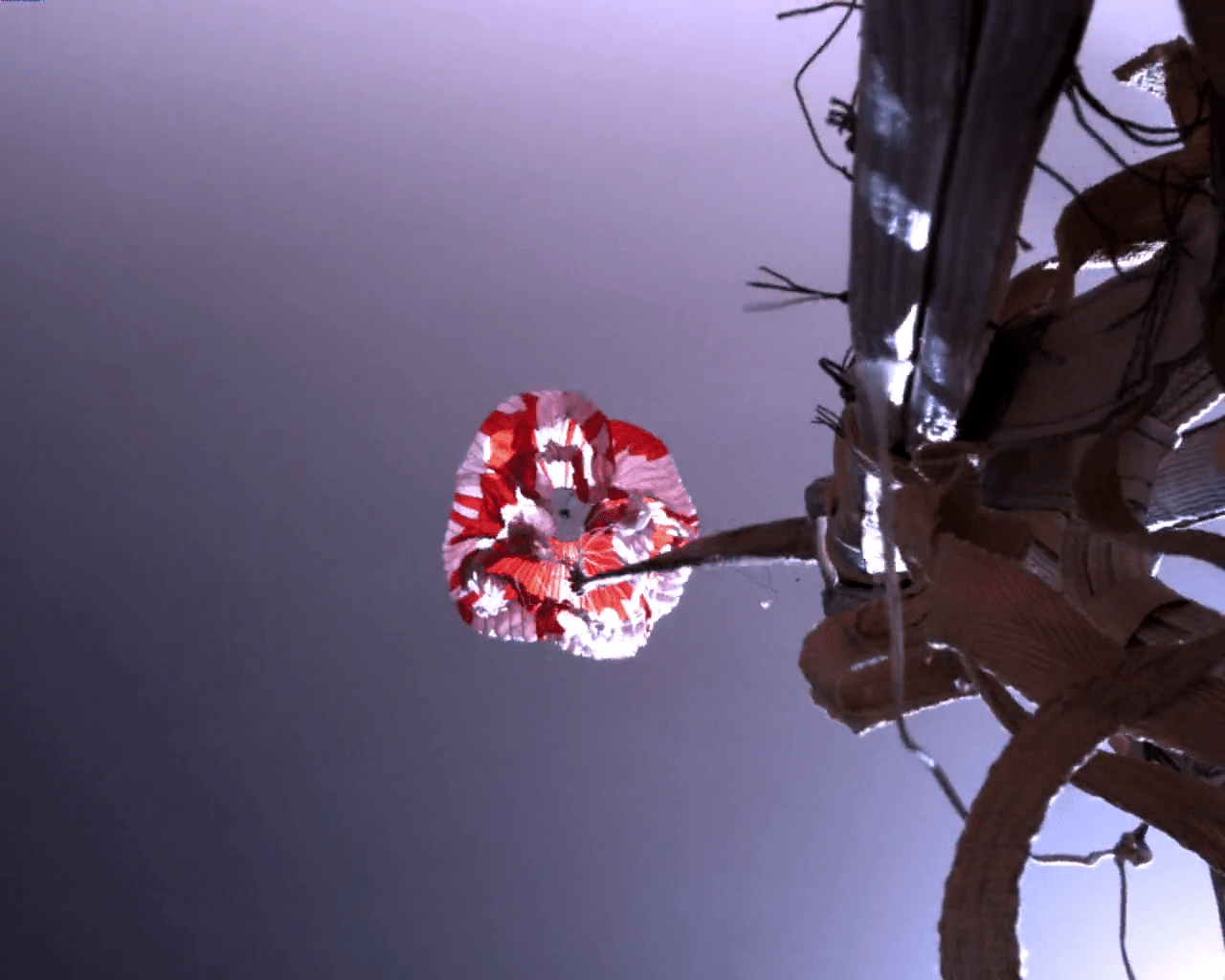
A câmera da sonda Perseverance, que está no planeta Marte desde fevereiro, captou no domingo (4) um momento curioso: um arco-íris, o que seria impossível, já que a fina atmosfera do planeta não tem nuvens com gotas d'água para permitir o fenômeno. Mas há uma explicação da própria Nasa para isso.
Andrew Good, porta-voz do Laboratório de Propulsão a Jato (JPL) da Nasa, disse ao site "Futurism" que o arco-íris foi provocado por uma refração da luz solar na câmera. A câmera frontal da sonda tem um tipo de proteção para a luz do sol, e a câmera traseira não. Por isso, a luz solar que vem da parte de trás da sonda bateu na proteção da câmera frontal, causando a difração que revelou o tal arco-íris.



"Os protetores solares não eram considerados essenciais na traseira [da Perseverance], então você ainda poderá ver artefatos de luz espalhados em suas imagens", explicou Good, referindo-se ao arco-íris.
Quem não ficou sabendo da explicação soltou suas teorias na internet. Neste tópico do Reddit (em inglês), as pessoas sugeriram ter sido causado por poeira, gelo ou até, de brincadeira, Leprechauns, figura mitológica irlandesa que mantêm potes de ouro no final dos arco-íris.
Selfies
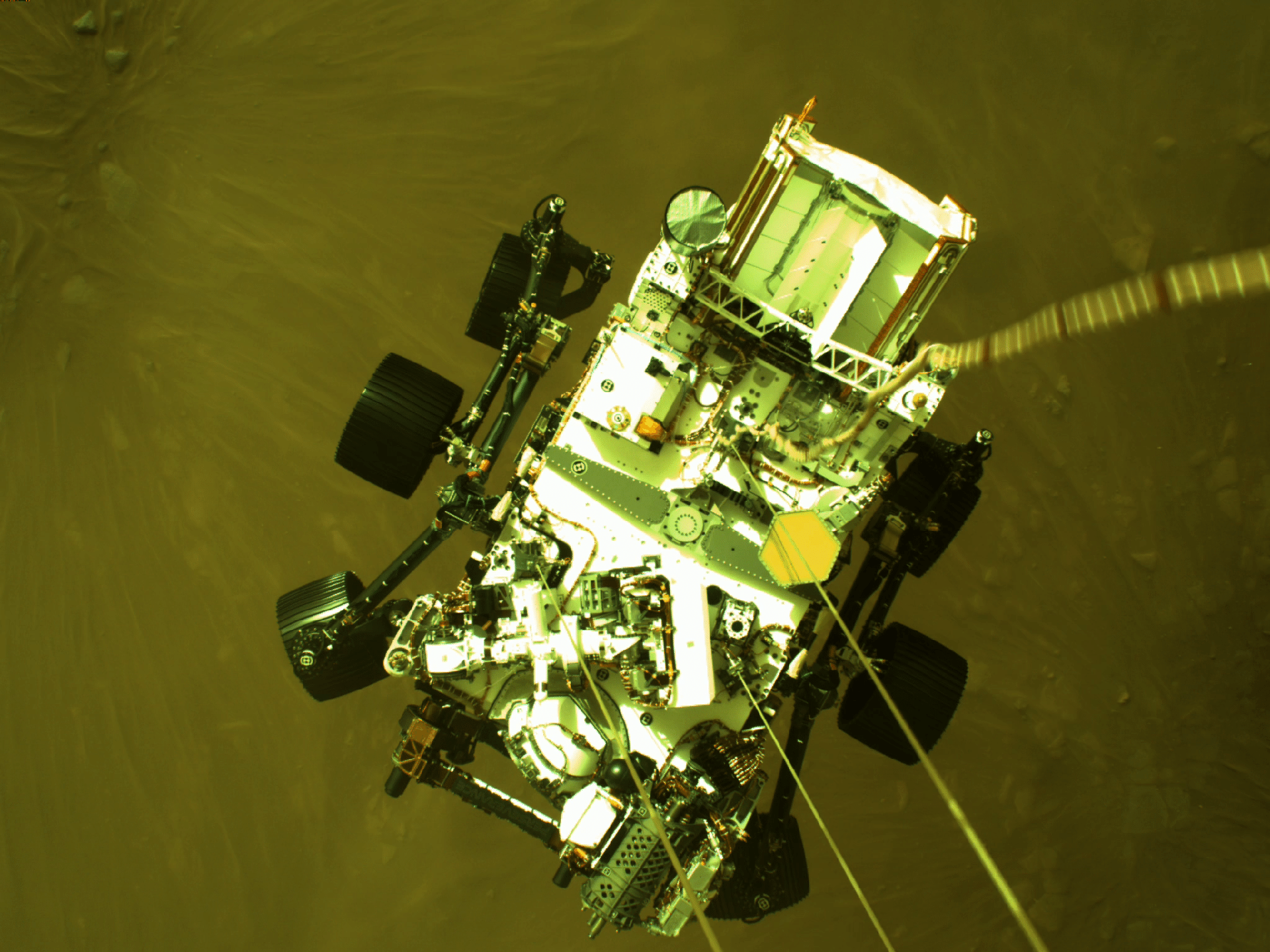
Enquanto isso, a sonda continua gerando fotos divertidas. Duas delas foram estas selfies tiradas com a Sherloc Watson, uma das câmeras do equipamento. Ela fica localizada na torre ao final do braço robótico do rover.
As duas fotos mostram o mastro de sensoriamento remoto do Perseverance, que é basicamente a "cabeça" da sonda, pois guarda muitas de suas câmeras e instrumentos científicos.
Há 23 câmeras na sonda, incluindo nove câmeras de engenharia, sete câmeras científicas e sete para registrar entrada, descida e pouso em Marte. A principal delas é a Supercam, presente no mastro de sensoriamento remoto. Segundo a Nasa, ela examina rochas e solos com uma câmera, laser e espectrômetros para buscar compostos orgânicos relacionados a possíveis sinais de vida no ado de Marte.



















ID: {{comments.info.id}}
URL: {{comments.info.url}}
Ocorreu um erro ao carregar os comentários.
Por favor, tente novamente mais tarde.
{{comments.total}} Comentário
{{comments.total}} Comentários
Seja o primeiro a comentar
Essa discussão está encerrada
Não é possivel enviar novos comentários.
Essa área é exclusiva para você, , ler e comentar.
Só s do UOL podem comentar
Ainda não é ? Assine já.
Se você já é do UOL, faça seu .
O autor da mensagem, e não o UOL, é o responsável pelo comentário. Reserve um tempo para ler as Regras de Uso para comentários.