Perseverance quebrará pedras com braço robótico para procurar vida em Marte

Chegou a hora: o rover Perseverance, da missão Mars 2020, da Nasa, começou a procurar ativamente por vida alienígena. Com seu braço robótico e instrumentos científicos, está explorando um antigo lago marciano, onde pode haver indícios de vida.
Até agora, o robô-jipinho estava atuando mais como um fotógrafo do que como um cientista. Ele enviou imagens e sons de Marte em alta definição, e também apoiou os cinco primeiros voos do helicóptero Ingenuity - que terá mais autonomia, atuando em parceria.
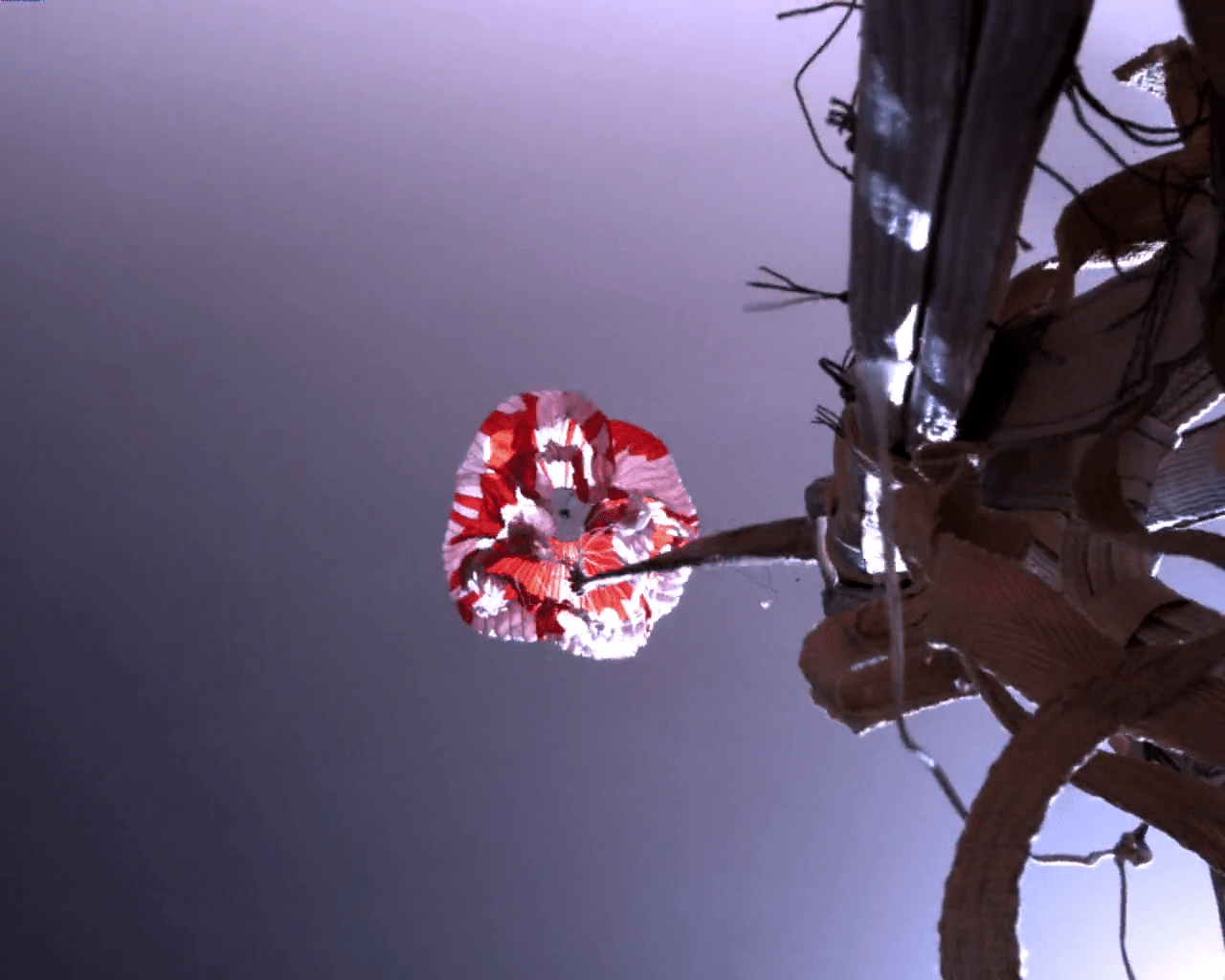
Em fevereiro, o Perseverance pousou na cratera Jezero, de 40km de diâmetro e 500m de profundidade, que há bilhões de anos foi um lago. Se já existiu vida no planeta, mesmo que apenas atividade microbiana, este é o local com mais chances de guardar evidências - e ele é equipado para detectá-las diretamente, além de coletar amostras que serão enviadas à Terra.



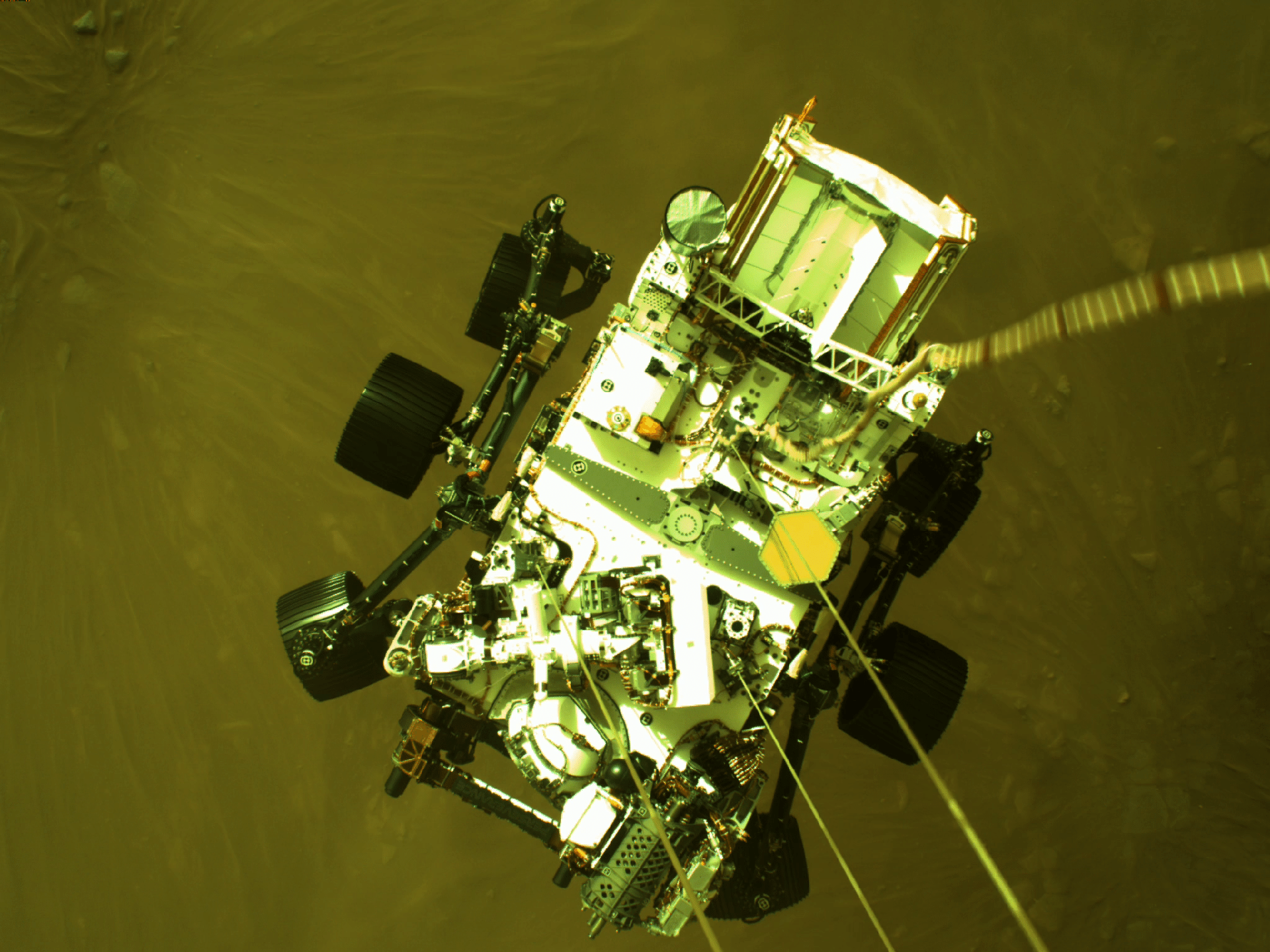
O rover de US$ 2,4 bilhões tem seis grandes pernas com rodas robustas, um longo braço robótico, e uma "cabeça" com câmeras, microfones, lasers e sensores (a SuperCam). Na "mão" dele há outra câmera e um espectrômetro (o instrumento Sherlok/Watson) e uma broca especialmente desenvolvida para a missão, capaz de extrair núcleos de rochas intactos - e não pulverizados, como seria o normal nesse tipo de missão.
Um dos objetivos é estabelecer uma linha do tempo do antigo lago. Entender quando ele se formou, quando e por que secou, e quando e como os sedimentos começaram a se acumular no terreno. "Quanto mais pedras você olha, mais você sabe", disse o cientista do projeto Perseverance, Ken Farley.
Análises geológicas podem revelar segredos da vida alienígena. Se as rochas forem sedimentares, como arenito e calcário, há mais chances de preservarem bios de vida no planeta vermelho. Se forem ígneas, formadas por atividade vulcânica que cientistas acreditam que ainda possa acontecer, não deve haver sinais de vida preservados, mas bons dados para cronologia.
Inovação
O rover fará algo inédito em Marte: colocará pelo menos 40 amostras, de diferentes locais da cratera Jezero, serão colocadas dentro de tubos, em um complexo sistema de armazenamento. Esses tubos serão deixados na superfície do planeta, para serem retirados por missões futuras. Este deve ser o maior desafio da Nasa nos próximos anos - as rochas devem chegar aqui só depois de 2030.
O Perseverance abriga sete tecnologias de ponta, ou totalmente inovadoras. Muito mais avançados que os rovers anteriores, que buscaram água ou exploraram a química da atmosfera e do solo, ele é equipado para realizar experimentos in loco e encontrar vida - seja atual ou fossilizada. E suas 23 câmeras de alta resolução já estão capturando detalhes nunca antes vistos do planeta vermelho.
Mesmo assim, trazer as amostras para a Terra é essencial para avançarmos nas pesquisas de vida interplanetária e formação do Sistema Solar. Nos laboratórios daqui, é possível fazer análises mais detalhadas. Também é algo que pode expandir os limites da exploração espacial das próximas décadas.
O Perseverance deve realizar seus experimentos em Marte por, pelo menos, 687 dias terrestres (um ano marciano). Ele é movido por um reator com núcleo de plutônio, capaz de produzir energia elétrica por até 14 anos.


















ID: {{comments.info.id}}
URL: {{comments.info.url}}
Ocorreu um erro ao carregar os comentários.
Por favor, tente novamente mais tarde.
{{comments.total}} Comentário
{{comments.total}} Comentários
Seja o primeiro a comentar
Essa discussão está encerrada
Não é possivel enviar novos comentários.
Essa área é exclusiva para você, , ler e comentar.
Só s do UOL podem comentar
Ainda não é ? Assine já.
Se você já é do UOL, faça seu .
O autor da mensagem, e não o UOL, é o responsável pelo comentário. Reserve um tempo para ler as Regras de Uso para comentários.